EDI Fellows for the January 2018 retreat read the book, Soonish:Ten Emerging  Technologies That’ll Improve and/or Ruin Everything, by Kelly Weinersmith and Zach Weiner. The Directors then asked them to pick one topic or fact featured in the book. Here is Sebastian Singh from the 2019 EDI cohort exploring the topic of ‘Programmable Matter.’
Technologies That’ll Improve and/or Ruin Everything, by Kelly Weinersmith and Zach Weiner. The Directors then asked them to pick one topic or fact featured in the book. Here is Sebastian Singh from the 2019 EDI cohort exploring the topic of ‘Programmable Matter.’
~~~~~~~~~~~~
Programmable Matter
By Sebastian Singh
Sebastian Singh – Class of 2019
Topic: What is programmable matter? What impact will it have on the economy and everyday life? Is it reasonable to expect programmable matter is attainable?
Introduction: In Soonish, the authors believe programmable matter is the future of technology. Researchers are seeking new ways to create programmable matter, throughchemical processes and changes in environment. This portfolio entry will examine current advances in the field of programmable matter and discuss its impact.
Programmable matter is defined as “matter which has the ability to change its physical properties (shape, density, moduli, conductivity, optical properties, etc.) in a programmable fashion, based upon user input or autonomous sensing”[1]. Programmable matter ranges from things as simple as liquid crystals, which can be altered by the application of an electric field, to something as sci-fi as the shape-shifting liquid metal T-1000 from “The Terminator.”
There are two types of approaches to programmable matter. The first is modular robotics. According to Michael Alba, author of The Promise and Peril of Programmable Matter
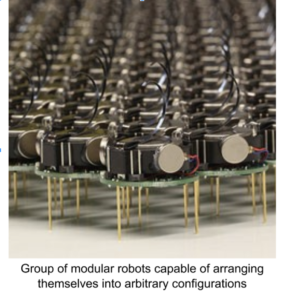
, “The modular robotics approach to programmable matter aims to develop robotic units capable of arranging themselves into arbitrary configurations”[2]. In 2013, a team of MIT engineers created M-Blocks, self propelling and assembling robots. The M-Block pivots using the principles of angular momentum. The engineers explain, “Inside each robot is a flywheel that spins at up to 20,000 rpm. When a sudden braking is applied to the flywheel, it transfers its momentum to the M-Block, propelling it forward”[3].
The other approach is using metamaterials, materials with properties that cannot be found in nature. For example, researchers at Cornell have built “muscle” for shape-changing, cell-sized robots. They have made a robot exoskeleton that can rapidly change shape when it senses chemical or thermal differences in its environment. It works by using a bimorph. A bimorph consists of two piezoelectric crystals, which become electrically polarized when 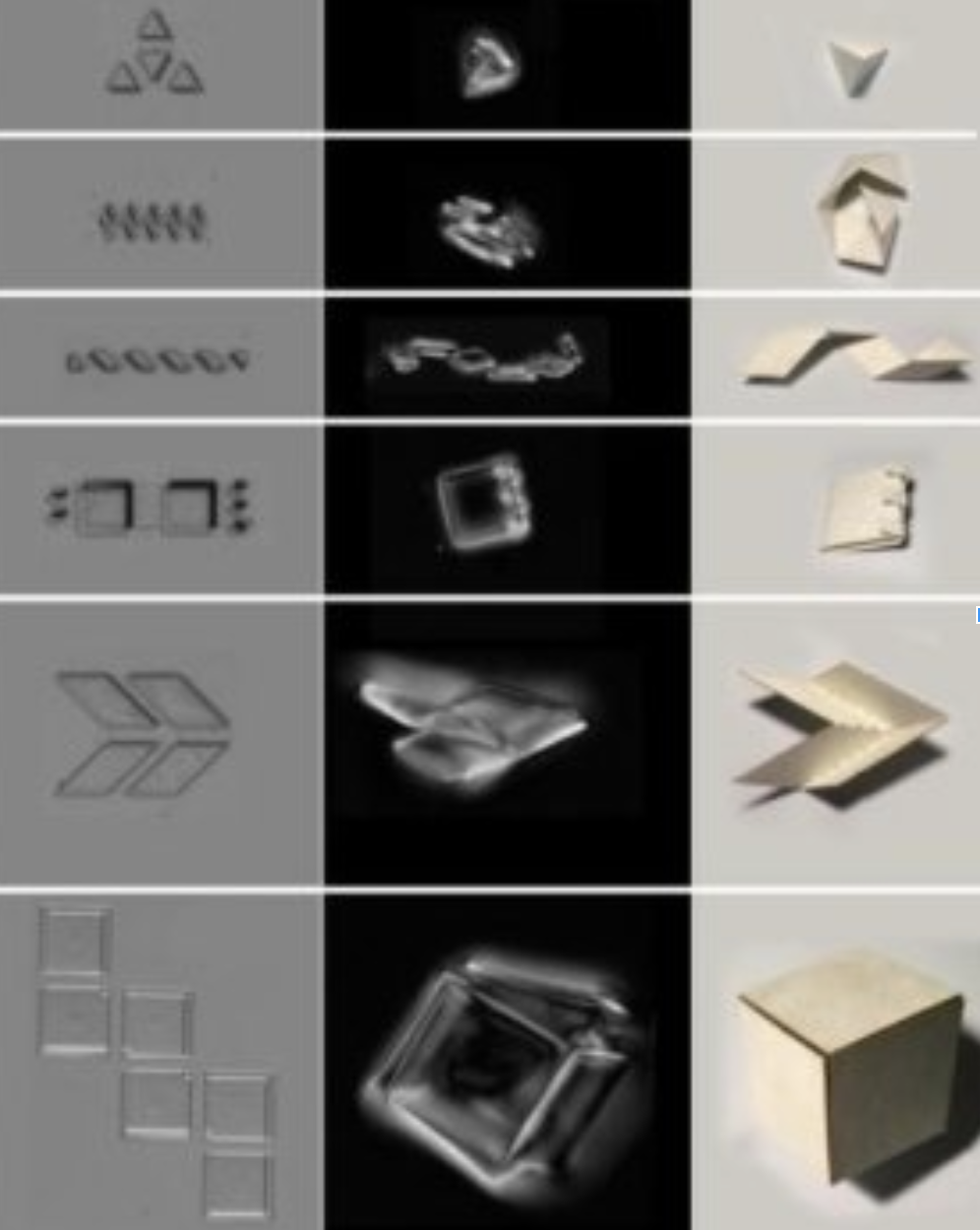 mechanically strained and vice versa. However, the stimulus can be present in many other forms including heat and chemical reactions. The materials used to create the bimorph are particularly important because of their chemical and physical qualities. The researcher at Cornell used glass and graphene. Graphene is so useful in this case because of its hybridization and extremely thin atomic thickness of 0.345 nm. Graphene is comprised of two bands: a valence band and a conduction band. The connection of the two bands influences the possibility to easily excite electrons out of the valence into the conduction band, making graphene a highly efficient heat and electric conductor. In other words, the 4 outer shell electrons in an individual carbon atom are available for chemical bonding, but in graphene, each atom is connected to 3 other carbon atoms on the two dimensional plane, leaving 1 electron freely available in the third dimension for conduction [4]. Glass plays an important part in the bimorph because its atoms are spread far apart. Not only does the bimorph respond to heat, but it also folds in response to chemical stimuli by driving large ions into the glass, causing it to expand. The bimorph is able to change shape due to the varying rate of expansion caused by differing thermal properties of each molecule. The
mechanically strained and vice versa. However, the stimulus can be present in many other forms including heat and chemical reactions. The materials used to create the bimorph are particularly important because of their chemical and physical qualities. The researcher at Cornell used glass and graphene. Graphene is so useful in this case because of its hybridization and extremely thin atomic thickness of 0.345 nm. Graphene is comprised of two bands: a valence band and a conduction band. The connection of the two bands influences the possibility to easily excite electrons out of the valence into the conduction band, making graphene a highly efficient heat and electric conductor. In other words, the 4 outer shell electrons in an individual carbon atom are available for chemical bonding, but in graphene, each atom is connected to 3 other carbon atoms on the two dimensional plane, leaving 1 electron freely available in the third dimension for conduction [4]. Glass plays an important part in the bimorph because its atoms are spread far apart. Not only does the bimorph respond to heat, but it also folds in response to chemical stimuli by driving large ions into the glass, causing it to expand. The bimorph is able to change shape due to the varying rate of expansion caused by differing thermal properties of each molecule. The  researchers are able to make a variety of folding structures ranging from triangular pyramids to cubes. They do this by using using atomic layer deposition. According to the researchers at Cornell, this is “chemically ‘painting’ atomically thin layers of silicon dioxide onto aluminum over a cover slip — then wet-transferring a single atomic layer of graphene on top of the stack” [5]. Their machines can shrink from three times larger than a red blood cell to three times smaller than a large neuron. In Soonish, the author’s example of a metamaterial in use is a reconfigurable straw which changes shapes in water.
researchers are able to make a variety of folding structures ranging from triangular pyramids to cubes. They do this by using using atomic layer deposition. According to the researchers at Cornell, this is “chemically ‘painting’ atomically thin layers of silicon dioxide onto aluminum over a cover slip — then wet-transferring a single atomic layer of graphene on top of the stack” [5]. Their machines can shrink from three times larger than a red blood cell to three times smaller than a large neuron. In Soonish, the author’s example of a metamaterial in use is a reconfigurable straw which changes shapes in water.
The effect of programmable matter on the economy is hard to predict because the final goal is so far in the future. However, if programmable matter envelops all industries, there will be a large effect on the economy. The majority of the population would be unemployed because manufacturing things if no longer necessary when you can program them. However, there would be much less dependence on money because of increased access to different objects. The authors in Soonish introduce good points, claiming that the programming for certain objects could be sold. They also bring up an interesting question: Could you create more programmable matter out of programmable matter or would you need to “go to the store and buy another bucket of goop”[6]. The effect on everyday life is rather obvious. Education would improve due to access to textbooks and humans would need less because of programmable matter’s omnipotent properties. However, there is a side to programmable matter that one might glance over. First, the programmable matter could be incorrectly programmed, leading to injury and death in extreme situations. In addition, if the matter is advanced enough, it could program itself, thus becoming self-conscious, and obtain the ability to end humanity. This idea is rather far-fetched though and hopefully is something we won’t have to worry about.
Through the examples mentioned earlier in this portfolio, we can see that programmable matter is a valid, attainable goal for the future. Despite recent advancements in the technology, it is too early to say how far programmable matter is from reality or if we could develop a metamaterial as advanced as transformium from the Transformer franchise, but we have definitely taken a step in the right direction.
References:
- Toffoli, Tommaso; Margolus, Norman (1991). “Programmable matter: concepts and realization”. Physica D. 47: 263–272. doi:10.1016/0167-2789(91)90296-L
- Alba, M. (2017, March 24). The promise and peril of programmable matter. Retrieved January 17, 2018, from engineering.com website: https://www.engineering.com/DesignerEdge/DesignerEdgeArticles/ArticleID/14967/The-Promise-and-Peril-of-Programmable-Matter.aspx
- Hardesty, L. (2013, October 4). Surprisingly simple scheme for self-assembling robots. Retrieved January 18, 2018, from MIT News website: http://news.mit.edu/2013/simple-scheme-for-self-assembling-robots-1004
- de la Fuente, J. (2009). Graphene applications & uses. Retrieved January 11,
2018, from Graphenea website: https://www.graphenea.com/pages/graphene-properties#.Wlfkz6inE2w
- Cornell University. (2018, January 3). Physicists build muscle for shape-changing, cell-sized robots. ScienceDaily. Retrieved January 11, 2018 from www.sciencedaily.com/releases/2018/01/180103160115.htm
- Weinersmith, K., & Weiner, Z. (2017). Soonish: Ten emerging technologies that’ll improve and/or ruin everything. New York: Penguin Press.